Another test of AI.
This time I asked ChatGPT to create a post. I haven’t yet checked it for accuracy.
Using a TOF Sensor on a Raspberry Pi
In recent years, Time-of-Flight (TOF) sensors have gained popularity for their ability to provide accurate depth information in various applications, from gesture recognition to robotics and augmented reality. When coupled with a Raspberry Pi, this combination opens up a world of possibilities for hobbyists, researchers, and developers. In this blog post, we’ll dive into the basics of TOF sensors and demonstrate how to integrate one with a Raspberry Pi.
Understanding Time-of-Flight (TOF) Sensors
Time-of-Flight sensors operate on the principle of emitting a light signal and measuring the time it takes for that signal to bounce back after hitting an object. This allows the sensor to calculate the distance between itself and the object with high precision. Unlike other depth sensing methods, TOF sensors are capable of producing accurate results regardless of lighting conditions.
Selecting a TOF Sensor
Before getting started, it’s crucial to choose a suitable TOF sensor. Popular options include the VL53L0X, VL53L1X, and VL53L5CX from STMicroelectronics, as well as the TFMini and TFMini Plus from Benewake. Be sure to consider factors like range, field of view, and compatibility with the Raspberry Pi.
Setting Up the Raspberry Pi
- Hardware Requirements:
- Raspberry Pi (any model with GPIO pins)
- TOF Sensor
- Jumper wires
- Power source for Raspberry Pi
- MicroSD card with Raspbian OS
- Connect the TOF Sensor:
- Wire the sensor to the Raspberry Pi using GPIO pins. Refer to the datasheet of your chosen sensor for pinout details.
- Install Required Libraries:
- Most TOF sensors have Python libraries available for easy integration. Use pip to install the necessary libraries.
bashpip install smbus
pip install vl53l0x
Writing the Python Script
Next, let’s create a Python script to interact with the TOF sensor. Below is a simple example using the VL53L0X sensor:
import time
import board
import busio
import adafruit_vl53l0x
# Initialize I2C bus and sensor.
i2c = busio.I2C(board.SCL, board.SDA)
vl53 = adafruit_vl53l0x.VL53L0X(i2c)
# Main loop.
while True:
try:
# Perform a measurement.
distance_mm = vl53.range
print(f"Distance: {distance_mm}mm")
# Add a delay to control the measurement rate.
time.sleep(0.1)
except KeyboardInterrupt:
break
# Clean up.
vl53.deinit()
This script initializes the sensor, reads distance measurements, and prints them to the console. Remember to handle exceptions appropriately for your specific use case.
Running the Script
- Save the Python script (e.g.,
tof_sensor.py) on your Raspberry Pi. - Open a terminal and navigate to the directory containing the script.
- Execute the script using the command:
python tof_sensor.py
You should see distance measurements printed in the console.
Expanding the Possibilities
With depth information readily available, you can now integrate the TOF sensor into a wide range of projects. From creating obstacle avoidance systems for robots to developing interactive installations, the possibilities are limited only by your imagination.
Remember to consult the datasheet and documentation of your chosen TOF sensor for advanced configurations and options. Additionally, consider exploring libraries and frameworks that enable more complex depth sensing applications.
In conclusion, the integration of a TOF sensor with a Raspberry Pi opens up exciting opportunities for depth sensing in various projects. Whether you’re a hobbyist or a professional, the combination of these technologies can lead to innovative solutions in the world of computer vision and robotics. So, grab your Raspberry Pi, connect a TOF sensor, and start exploring the depth of possibilities!






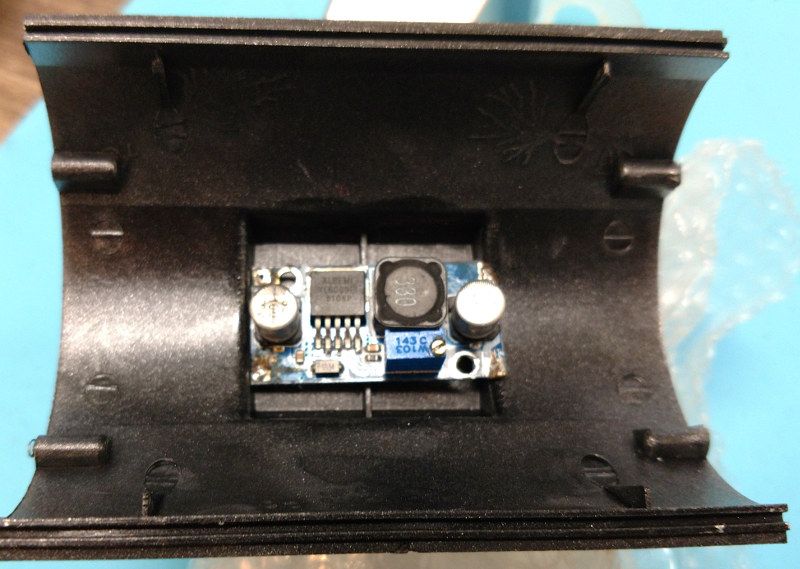
 Pi 3 B+ and one can rest nicely on the curved bottom. The back of the case neatly covers the ethernet and USB ports maintaining water resistance.
Pi 3 B+ and one can rest nicely on the curved bottom. The back of the case neatly covers the ethernet and USB ports maintaining water resistance.
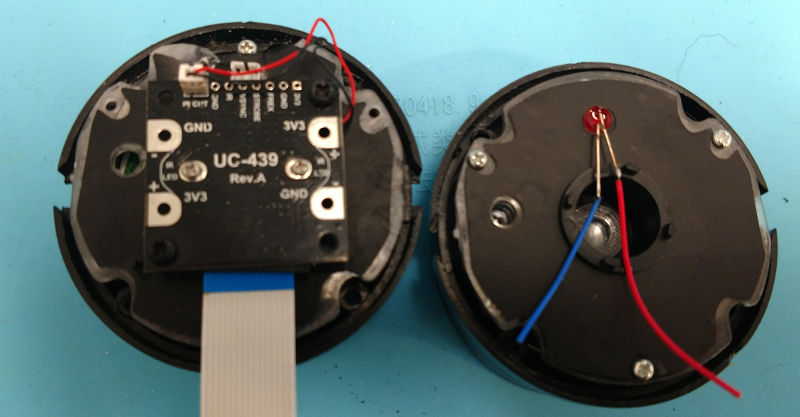





 When the battery is fully charged, the blue LED is turned off and an amber led between the red and green ones lights. One feature I really like is a small momentary push button on the board which powers off (resets) the PiZero. This is especially useful when removing and replacing the SMB card. Just hold it in when removing or replacing the card and the SMB card is not likely to get scrambled as it easily can when it is removed with the PiZero under power. The PiZ-UpTime will extinguish the bright LEDs when external power is lost, saving valuable battery life. When the battery gets down to a limit, the PiZ-UpTime shuts down the PiZero nicely.
When the battery is fully charged, the blue LED is turned off and an amber led between the red and green ones lights. One feature I really like is a small momentary push button on the board which powers off (resets) the PiZero. This is especially useful when removing and replacing the SMB card. Just hold it in when removing or replacing the card and the SMB card is not likely to get scrambled as it easily can when it is removed with the PiZero under power. The PiZ-UpTime will extinguish the bright LEDs when external power is lost, saving valuable battery life. When the battery gets down to a limit, the PiZ-UpTime shuts down the PiZero nicely.